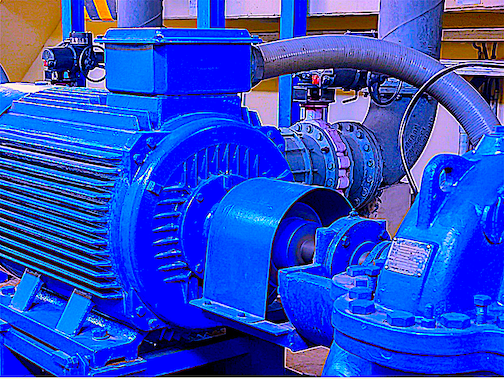
A loose base is a common electric-motor consideration in new applications and following the aging of a motor-system application. In this case study we explore the use of Electrical Signature Analysis (ESA) and motion amplification to discover the issue and confirm the condition of the base and application. The electric motor and pump in this case study are part of a chilled-water system in a critical application. The motor and motion-amplification equipment are shown in Fig. 1. The motor-nameplate information is shown in Fig. 2.
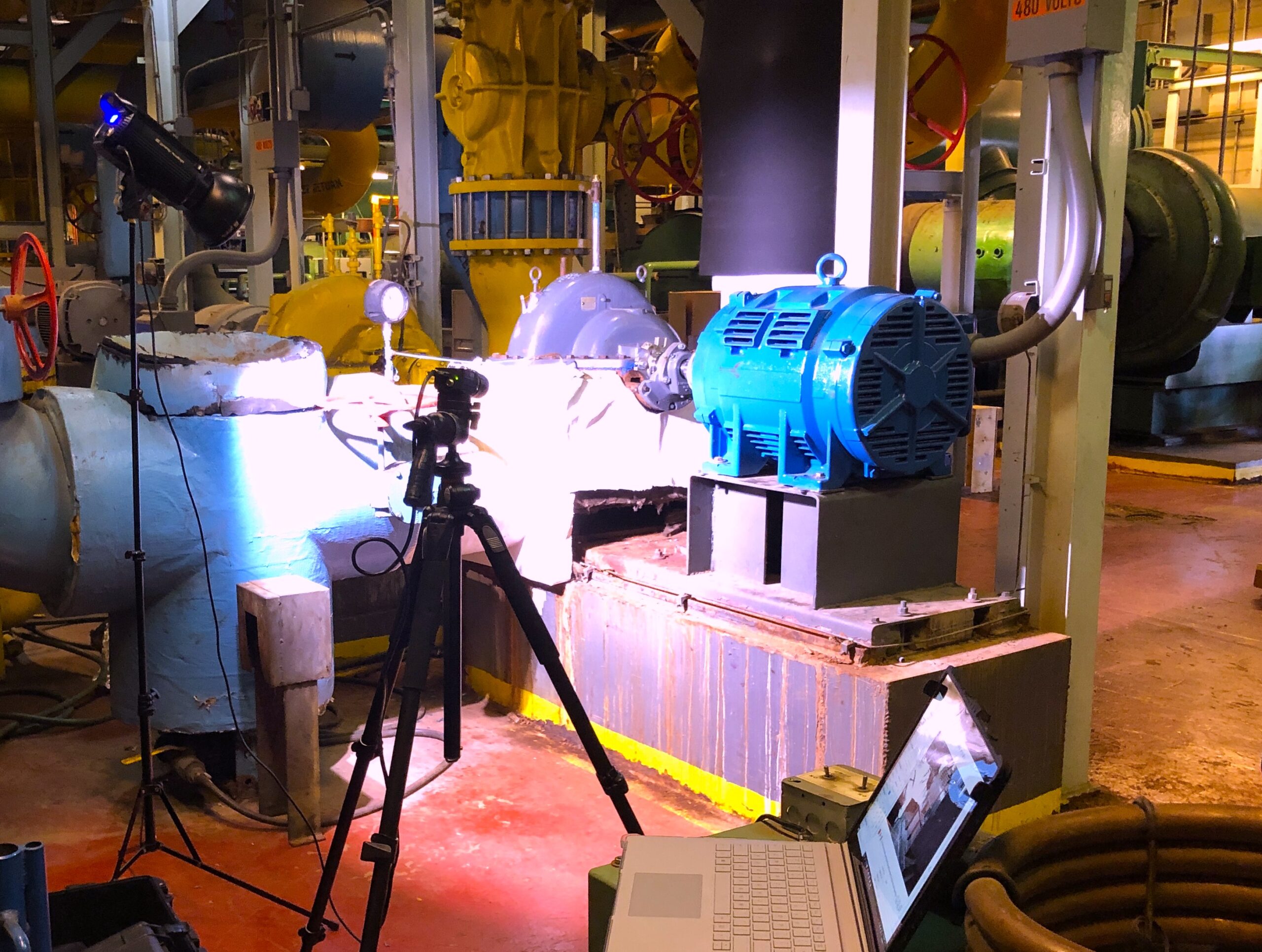
Fig. 1. The studied motor is part of chilled-water pumping system in a critical application.
It’s shown here with the motion-amplification equipment used in the ESA testing.
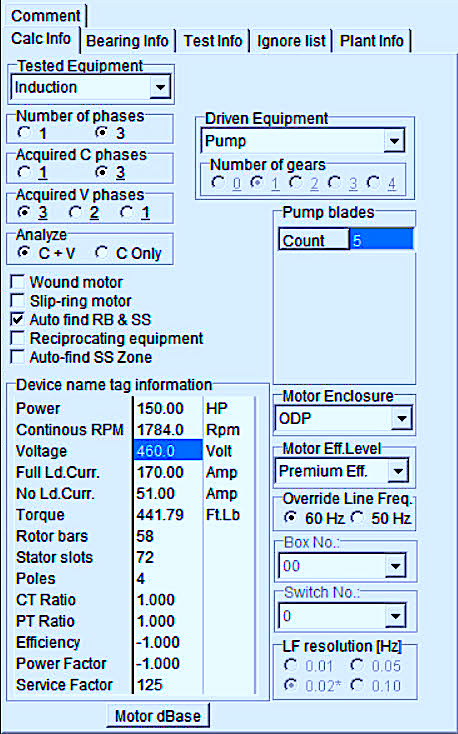
Fig. 2. Nameplate information for the studied electric motor.
It is noted in Fig. 3, there is a significant current unbalance associated with a loose connection as identified with an impedance unbalance. Additionally, the motor is overloaded for this application, although the power factor and efficiency are acceptable. The motor will overload and the winding will eventually fail.
Fig. 3. Operating characteristics of the studied electric motor.
Unbalance and other conditions such as misalignment are indicated with 1X RPM, such as found in Fig. 4. The addition of the half-running speed peaks indicates a possible looseness. High-frequency static and dynamic eccentricity, which would go along with severe misalignment conditions, are not present. However, Fig. 5 indicates stator frequencies that can be associated with extreme external vibration.
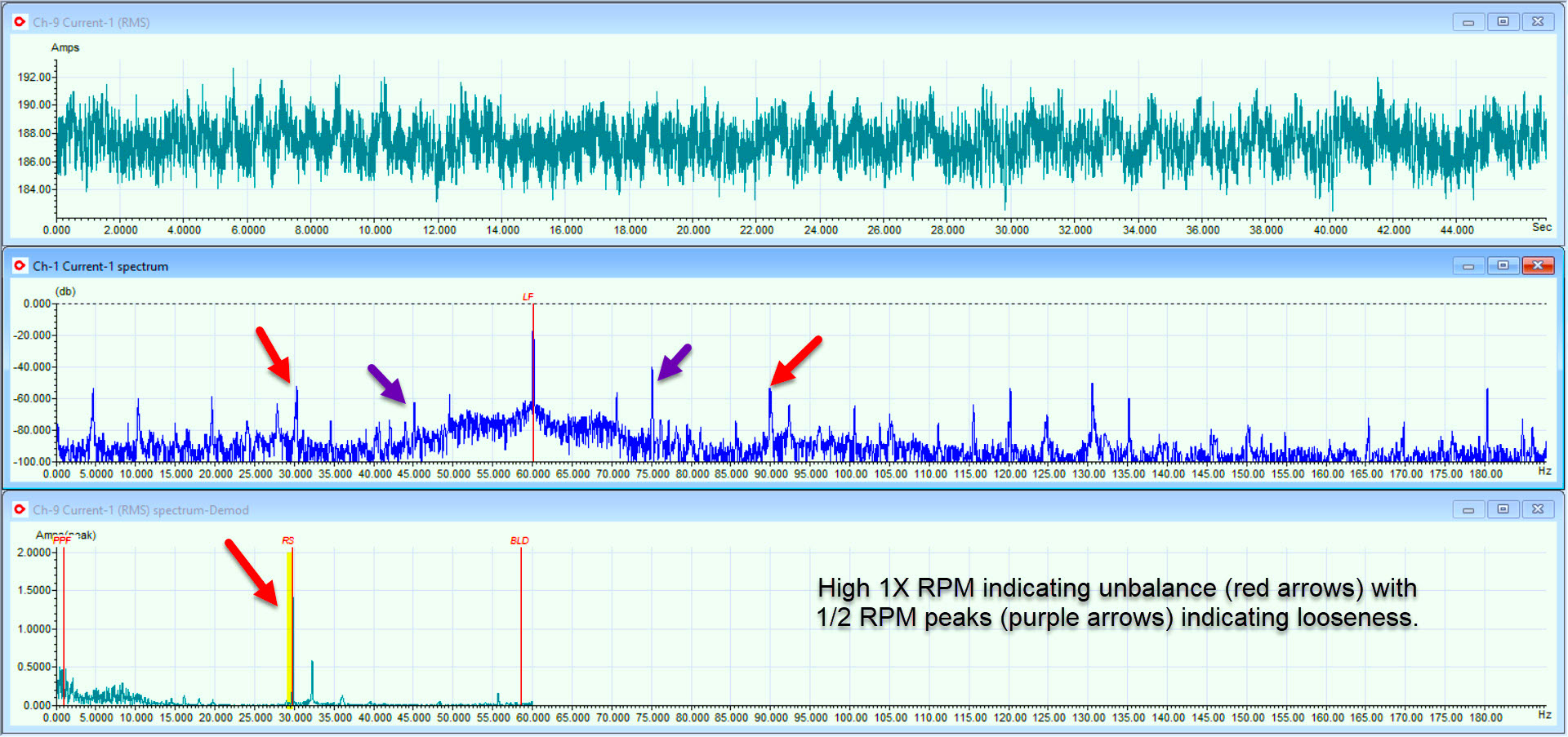
Fig. 4. One-times running speed and half-speed sidebands indicating looseness.
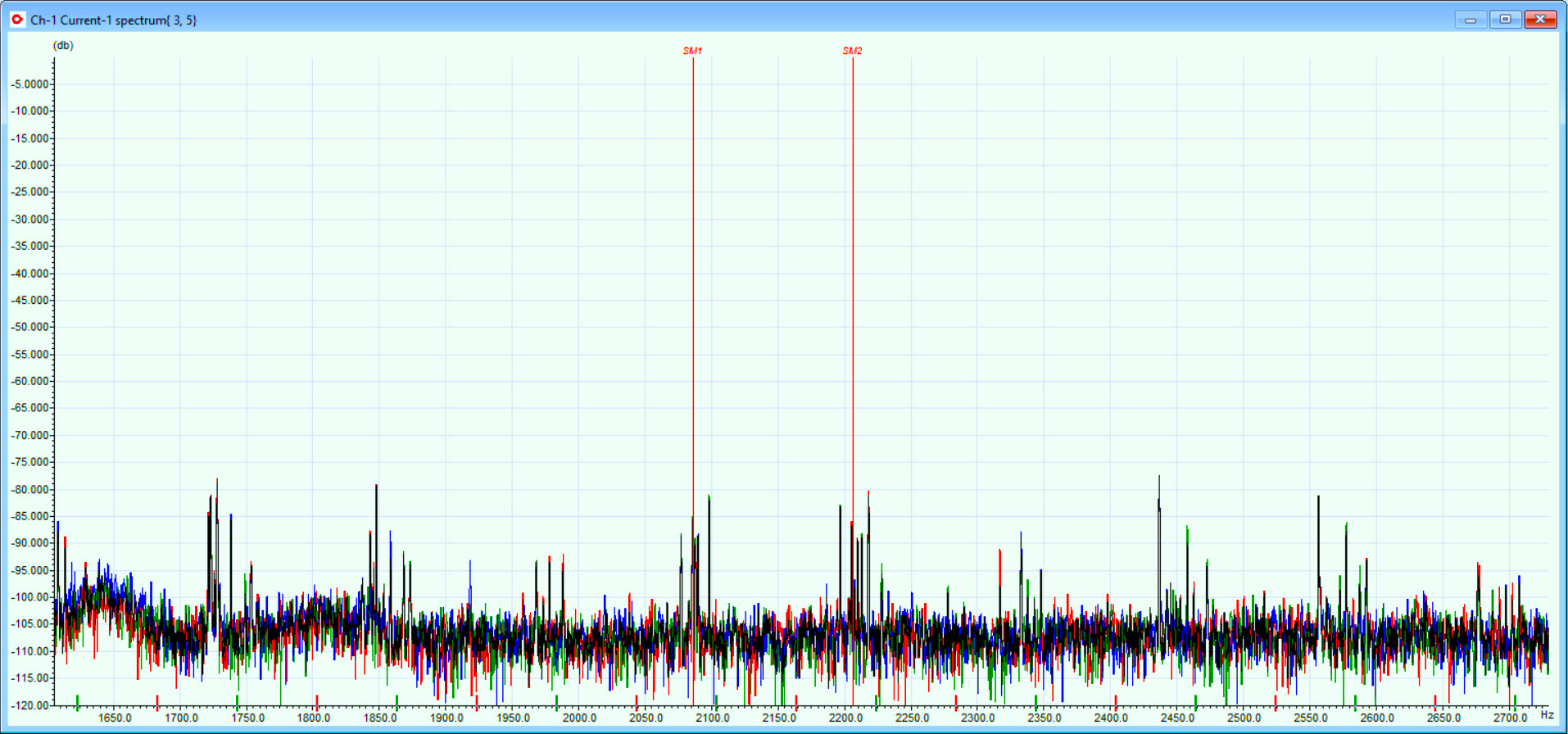
Fig. 5. Stator electrical signatures with sidebands.
The use of motion amplification was utilized to confirm the findings with ESA. The video that shows this can be found at the end of the article.
As shown in Fig. 6 and the motion amplification video, the base grouting was damaged, and the base bolts at the opposite drive end of the motor were loose. This combination of conditions takes the small remaining unbalance of the electric motor and treats it as a springboard that amplifies the vibration and making alignment difficult.

Fig. 6. The defective area of the motor base with missing grouting and loose bolts.
The bolts were tightened to confirm the condition and the motor was aligned. The 1X rpm and stator signatures, including the losses (shown in Fig. 7 and Fig. 8) were eliminated.
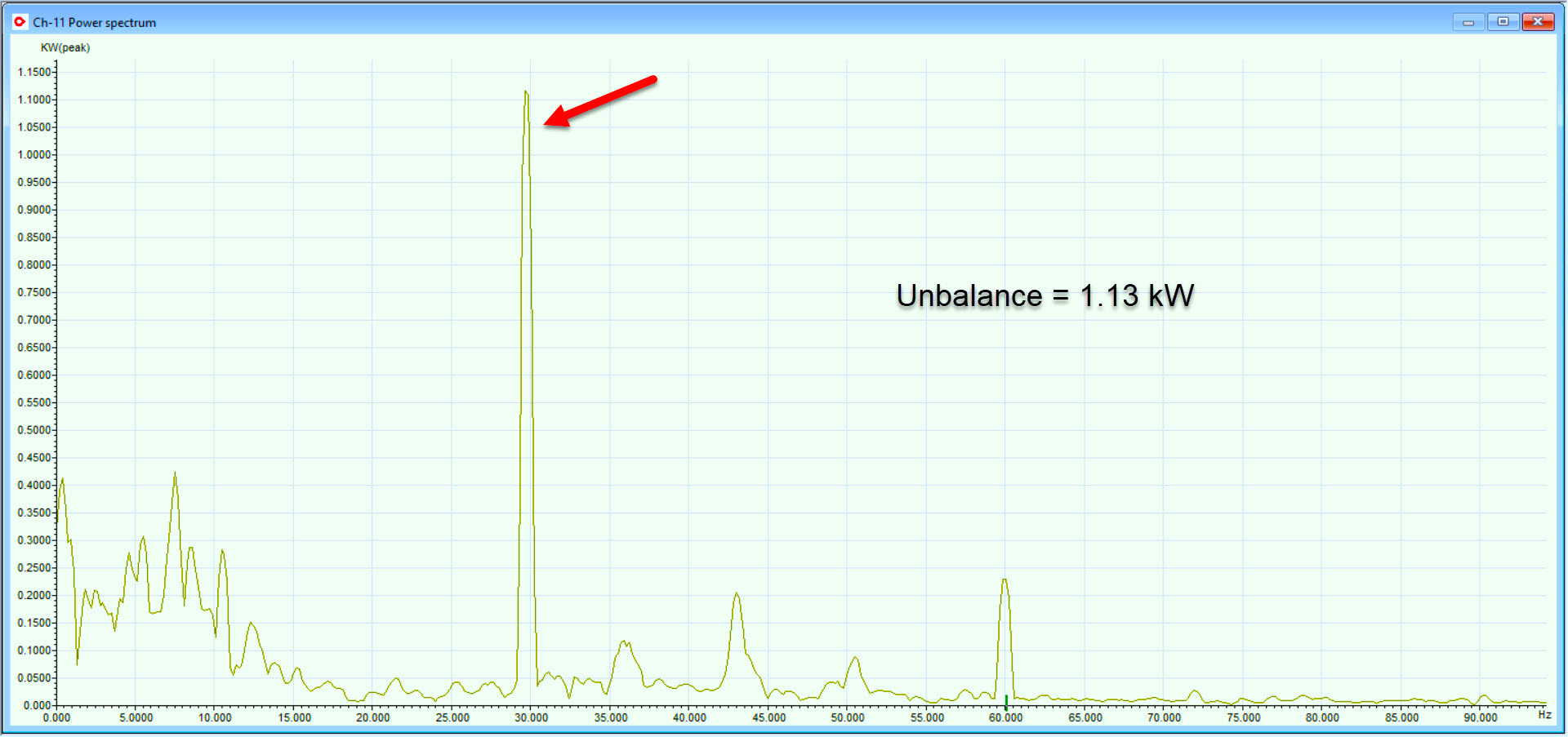
Fig. 7. kiloWatt (kW) losses associated with the unbalance is 1.13 kW.
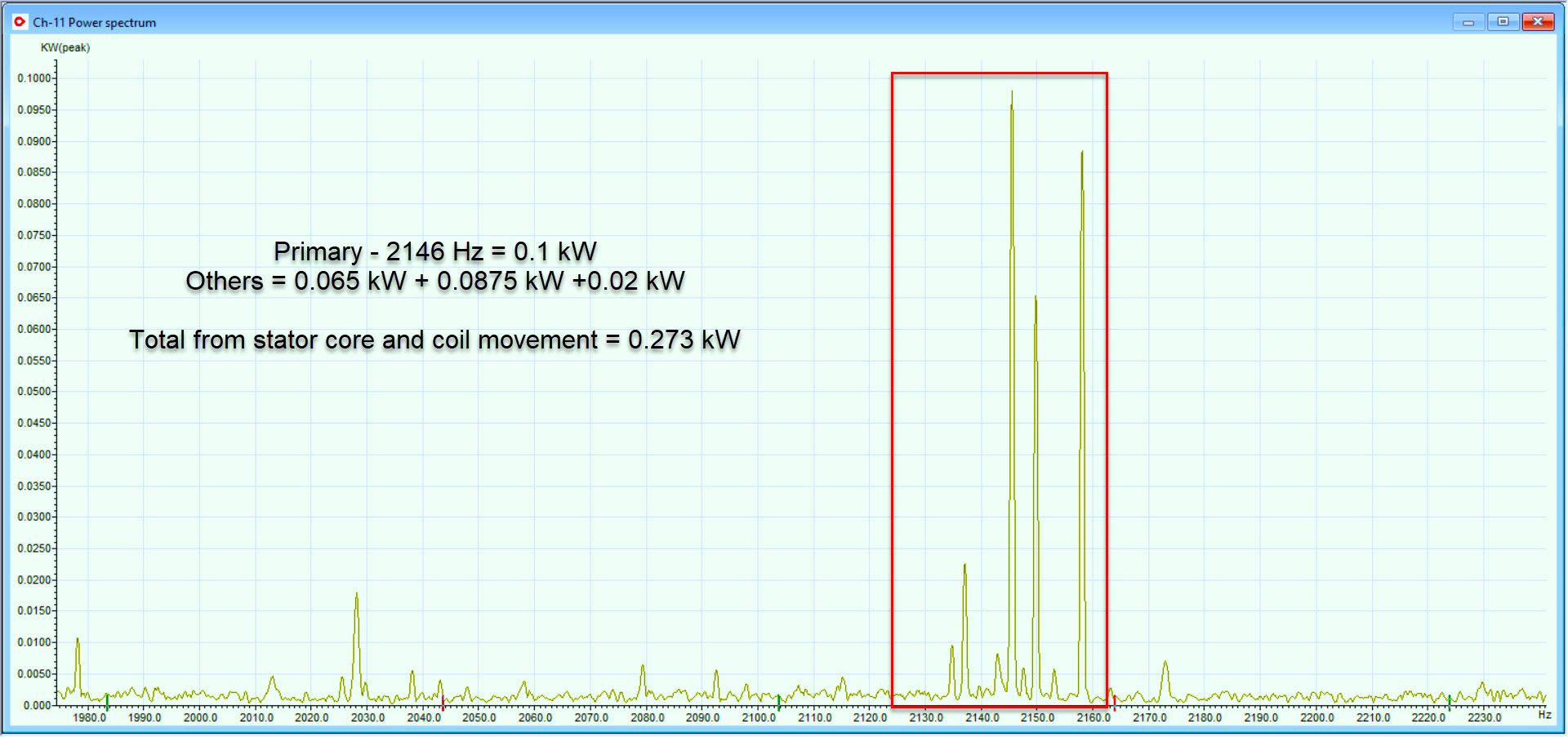
Fig. 8. Losses associated with stator core and winding movement, including sidebands, is 0.273 kW.
CALCULATING THE COST OF THE PROBLEM
The motor operates in these conditions for 8,760 hours, except during unexpected outages, with demand charges of $10/kW and $0.10/kWh. The losses associated with the loose base total ~1.4 kW. The demand would be: 1.4kW * 12 months * $10/kW demand = $168 demand; 8,760hrs * 1.4 kW * $0.10/kWh = $1,226; for a combined total of $1,394 in direct energy losses.
Greenhouse gas emissions associated with the losses are: 8,760 hrs * 1.4 kW * (1MW/1000kW) * 0.707 Tons CO2/MWh = 8.7 Tons CO2 per year.TRR
Click Here To View The Referenced Motion-Amplification Video
Or Go To
https://youtu.be/or6YrXDpMds
ABOUT THE AUTHOR
Howard Penrose, Ph.D., CMRP, is Founder and President of Motor Doc LLC, Lombard, IL and, among other things, a Past Chair of the Society for Reliability and Maintenance Professionals, Atlanta (smrp.org). Email him at howard@motordoc.com, or info@motordoc.com, and/or visit motordoc.com.
Tags: motors, pumps, motor testing, motion-amplification, reliability, Electrical Signature Analysis, ESA, vibration analysis, reliability, availability, maintenance, RAM

